La base roulante
La première chose que nous nous sommes demandé fut “Quelles types de roues allons-nous utiliser ?”, en effet le choix des roues est primordial pour déterminer les futurs mouvements du robot, après avoir pesé le pour et le contre de chaque roue, au final nous avons choisi d’utiliser des roues mécanum.

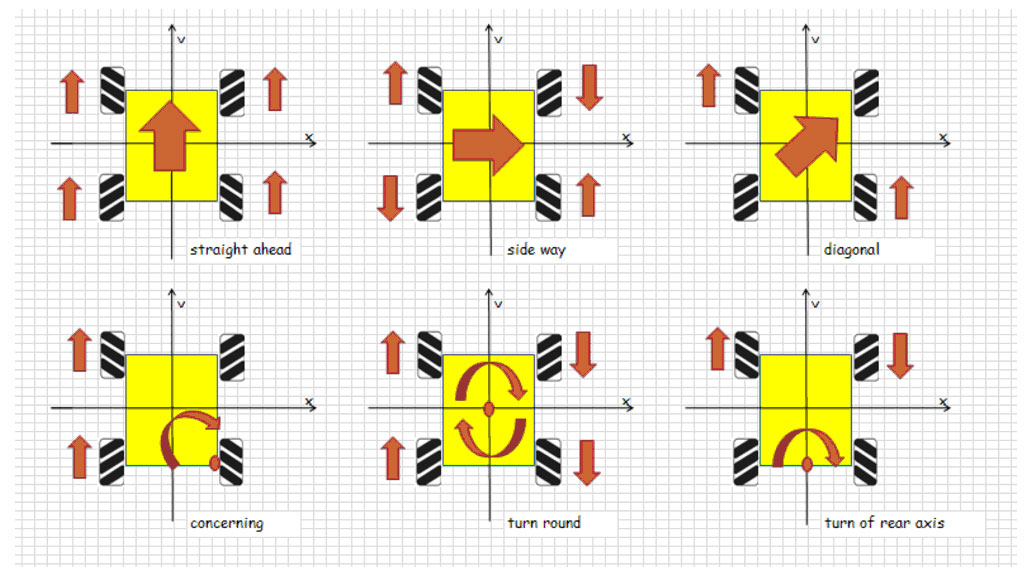
Le choix de ces roues, c’est fait sur différents critères, en effet l’avantage de ces roues est, leur mobilité accru pour se mouvoir. Ce type de roue est certes complexe à utiliser mais nous permet de faire des mouvements uniques, nous faisant gagner en mobilité et rapidité. Avec des roues mecanum il est possible de se mouvoir dans toutes les directions possible.
En revanche l’inconvénient de ses roues et leur manque d’adhérence, mais également le besoin d’être sur un terrain plat pour que les mouvements s’exécute correctement. Le plateau sur lequel se déroule la compétition peut avoir des petites imperfections c’est pour cela qu’il a fallu trouver une solution pour permettre aux roues de toujours rester en contact. Pour cela nous avons réfléchi à plusieurs solutions, la première étant de faire une base triangle avec 3 roues, l’avantage de cette méthode est qu’elle permet d’avoir une très bonne stabilité sur un terrain pouvant présenter des imperfections permettant à nos roues de toujours garder un contact avec le sol, l’inconvénient de cette méthode est la complexité pour se déplacer en effet cette configuration demande des calculs très complexes pour pouvoir aller dans différentes directions. La deuxième solution a été d’élaborer une base avec 4 roues placées en carré, l’avantage de cette méthode est la simplicité pour se mouvoir dans toutes les directions possibles, en revanche cette méthode ne permet pas d’avoir les 4 roues qui reste toujours en contact avec le sol, il a donc fallu trouver une autre solution pour permettre cela. Le plus évident a été d’élaborer un système de pivot sur deux roues, le principe est simple une tige filleté en métal traverse toute la base, et repose sur des roulements à billes, puis les deux extrémités sont visées pour que les deux blocs de roues ne bougent plus.
Mais quels moteurs allons nous utiliser ?
Avec les roues mecanum il est primordial d’être très précis concernant le contrôle des moteurs c’est pour cela que nous avons choisi d’utiliser des moteurs “NEMA 17” rapides, puissants et précis, ce sont les moteurs qui conviennent le mieux à nos besoins pour pouvoir contrôler sans problème majeur notre base.
.png)
.png)
Ce système permet de toujours garder un contact avec le sol et répond donc à tous les critères qui nous avions posé :
- être simple d’utilisation
- permettre un contact permanent avec le sol
Maintenant que notre système de base est établi nous avons procédé à de nombreuses améliorations la première fut la mise en place d’un renfort sur le côté des roues qui vont non seulement empêcher à la plaque en acrylique de se fragiliser mais en plus, protéger les roues de potentiels obstacles. Les différentes pièces en impression 3D ont également été améliorer notamment grace à des congés qui permettront de gagner en poids mais également de ne pas devenir coupant pour les fils électriques. Nous avons également ajouté un bloc central pour pouvoir par la suite y accrocher la plaque qui supportera tout ce qui se trouvera au-dessus de la base roulante notamment toute la partie électronique ou encore la mécanique des pinces pour attraper les plantes. Ce bloc a été conçu pour être le plus ergonomique en utilisant le moins de PLA possible.
.png)
.png)
Le problème majeur de notre base actuelle est le bloc central, en effet celui-ci n’est retenu que par le pivot, par conséquent le bloc tourne autour du pivot tout comme les deux blocs de roues ce qui est un véritable problème puisque cela signifie que toute la partie supérieure de notre robot ne sera pas stable ce qui peut entrainer des collisions avec nos roues. Pour remédier à cela une longue phase de test a été mise en place pour déterminer quel système est le meilleur. Dans un premier temps il nous est paru évident que l’utilisation de ressort était la plus judicieuse car ils agiraient comme des suspensions sur une voiture, laissant la possibilité aux roues de bouger tout en bloquant un maximum le bloc central. Un premier prototype a donc été mit en place.
.png)
.png)
.png)
Notre système de ressort est donc placer sur la plaque de dessus mais également sur les blocs de roues, permettant ainsi à la partie centrale de rester le plus stable possible tout en laissant la possibilité aux roues de continuer de tourner autour du pivot. Dans un souci de sureté nous avons placé des trous sur la plaque juste au-dessus des roues, cela permettra d’empêcher que les roues touches la plaque du dessus si cela devait arriver.
En théorie notre système de pivot est désormais fini, malheureusement lors de nos essais nous nous sommes rendu compte que nos ressorts de traction avaient une force de traction bien trop faible pour pouvoir tirer efficacement le bloc central est empêcher celui-ci de bouger, en effet le mouvement était limité mais un effet de rebondissement apparaissait, ce qui était très problématique notament pour la détection des ennemis avec le lidar car cela pouvait fausser les résultats de celui-ci. De plus les ressorts dont nous avions besoin couter beaucoup trop chère pour notre utilisation. Par conséquent nous avons pris la décision de garder nos ressorts mais d’ajouter quelques choses pour limiter cet effet de rebondissement, des amortisseurs ont donc été conçut leur but est simple atténuer l’effet de rebondissement pour rendre le bloc central plus stable, pour cela nous avons créé une pièce dans laquelle nous mettrons une matière assez souple comme de la mousse puis cette même pièces se fixent à l’intérieur d’un bloc de soutien précédemment créé pour les moteurs.
.png)
.png)
Ce système nous a permis d’obtenir une base roulante entièrement fonctionnelle qui correspond à nos critères :
- Permettre un usage simple des roues mecanum
- Avoir un contact permanent avec le sol
- Être suffisamment puissant pour transporter tout ce qui est nécessaire
Les roues mecanum
Maintenant que nous avons élaboré notre base roulante, il a fallu adapter les roues mecanum à notre utilisation pour cela une pièce que l’on appellera “NOYAU” a été créé, cette pièce à plusieurs fonctionnalités, la première étant de remplacer le noyau d’origine pour nous permettre de fixer la roue aux moteurs la deuxième est d’inclure un roulement à billes directement dans le noyau pour nous permettre de répartir le poids en faisant traverser une vis à l’intérieur.
.png)
.png)
Tests, validations et axes d’améliorations
De nombreux tests ont été faits pour pouvoir vérifier si notre système était fiable et correspondait réellement à nos attentes et nous avons pu en conclure que cette base correspondait à nos attentes mais qu’elle pouvait encore être amélioré et ce de diverses manières.L’une des plus grosses améliorations à apporter serait le système de pivot, en effet celui-ci fonctionne parfaitement mais l’effet de rebondissement reste encore très présent et peut-être problématique, il serait donc bon d’investir dans des ressorts avec une plus grosse tension pour éviter cela.