Capteurs
Les capteurs de distance sont des composants essentiels pour les robots. Ils permettent au robot de percevoir son environnement et de mesurer les distances par rapport aux objets qui l’entourent. Ces capteurs utilisent différentes technologies telles que l’ultrason, l’infrarouge ou la vision par ordinateur pour détecter les obstacles et calculer les distances. Grâce aux capteurs de distance, un robot peut éviter les collisions en détectant les objets qui se trouvent sur son chemin. Il peut également mesurer la distance entre lui-même et un objet spécifique, ce qui est utile pour des tâches telles que la navigation, l’inspection ou la manipulation d’objets. Les capteurs de distance sont souvent utilisés en combinaison avec d’autres capteurs et systèmes de contrôle pour permettre au robot d’interagir de manière autonome avec son environnement. Ils sont largement utilisés dans des domaines tels que la robotique industrielle, la robotique médicale, la domotique et bien d’autres.
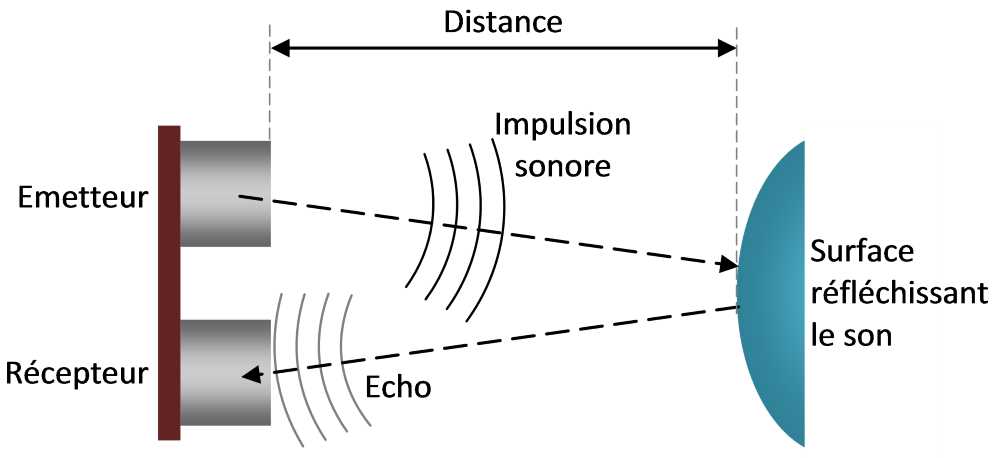
Pour les PAMIs, l’ultrason a été le moyen choisi pour mesurer des distances. C’est avec le célébre HC-SR04 Capteur à ultrason largement utilisé dans les projets de robotique. Il est capable de mesurer des distances en utilisant des ondes sonores à haute fréquence. Le capteur émet un signal ultrasonique et mesure le temps qu’il faut pour que le signal rebondisse sur un objet et revienne au capteur. En utilisant cette mesure de temps, le capteur peut calculer la distance entre lui-même et l’objet.
Le HC-SR04 est un capteur relativement précis avec 3 mm de marge d’erreur, une portée jusqu’à 4 m et une distance minimale de 2 cm ainsi que d’autres caractéristiques importantes à prendre en compte pour son utilisation.
Il est important de savoir que ce capteur est très fragile, pendnant la phase de test pour les PAMIs, il est arrivé à deux reprises que le robot se cogne et mette hors service le capteur.
De plus, sa précision à 3 mm près théorique peut être vraie en statique. Mais quand il s’agit de la dynamique c’est une tout autre chose. Le signal se perd souvent donnant des distances mirobolantes comme 1200 m ou même plus quand le signal revient. Car le plus souvent le signal était perdu et ne revenait pas, dans ce cas la distance vaut 0, ce qui peut être problèmatique pour véirifer la présence d’un objet. Une énorme masse de valeurs incongrues se mélange aux données utiles, ce qui influence le robot en mal lors des matchs.
Il est donc nécessaire de filtrer ses données afin de garder que le plus important.
Mais comment faire la différence entre les vraies et fausses valeurs ?
Rapidement, il est possible d’éliminer la majorité des fausses valeurs :
-
Les données dépassant 4 m ne sont pas à prendre en compte. Il est préférable même de restreindre au maximum la zone à analyser car il n’est pas nécéessaire dans cette situation de savoir si un robot se trouve à 2 m ou à 3 m. Ce qui importe c’est la distance avant l’impact. Sur les PAMIs, toutes les valeurs supérieurs à 90cm ne sont pas prises en compte.
-
De même, les données inférieures à 2 cm ne sont pas à prendre en compte. Ce sont des valeurs impossibles à mesurer avec ce capteur.
-
Certaines fausses valeurs peuvent encore se cacher en se trouvant dans l’intervalle qui peut être pris en compte. Par exemple : Le robot détecte 5 fois de suite un objet à 80 cm, puis la 6ème valeur indique 5 cm. C’est une valeur possible indiquant un impact futur. Mais c’est aussi une valeur qui n’est pas en accord avec les dernières mesures. Il est donc nécessaire de développer un algorithme de filtrage de ces données parasites. Cet algorithme pourrait simplement être la mise en place direct d’une série de nouvelle mesure afin de vérifier l’information.
Voici comment se servir au mieux de ce capteur pour analyser son environnement. Pour la CDR 2025, ce même capteur ne sera pas retenu à cause de sa fragilité, sa taille et sa précision. Mais pour le thème Minecraft choisi, il est vrai que ce capteur ajoutait une touche d’esthetisme à cette abeille.