Roues
Les roues du robot permettent de le déplacer et de lui donner une mobilité. Elles sont essentielles pour assurer le mouvement du robot sur différentes surfaces et terrains. Les roues peuvent être de différents types, tels que les roues motrices, les roues directrices ou les roues omnidirectionnelles, en fonction des besoins du robot et de son mode de déplacement. Il est important de choisir les roues appropriées en fonction des contraintes de charge, de vitesse et d’adhérence pour assurer un bon fonctionnement du robot.
Sur ces PAMIs, il y en a 2 types :
- Bille Folle: Une bille folle est une petite roue libre qui permet au robot de se déplacer dans toutes les directions sans avoir besoin de roues directrices. Elle est souvent utilisée en combinaison avec des roues motrices pour offrir une grande maniabilité au robot.

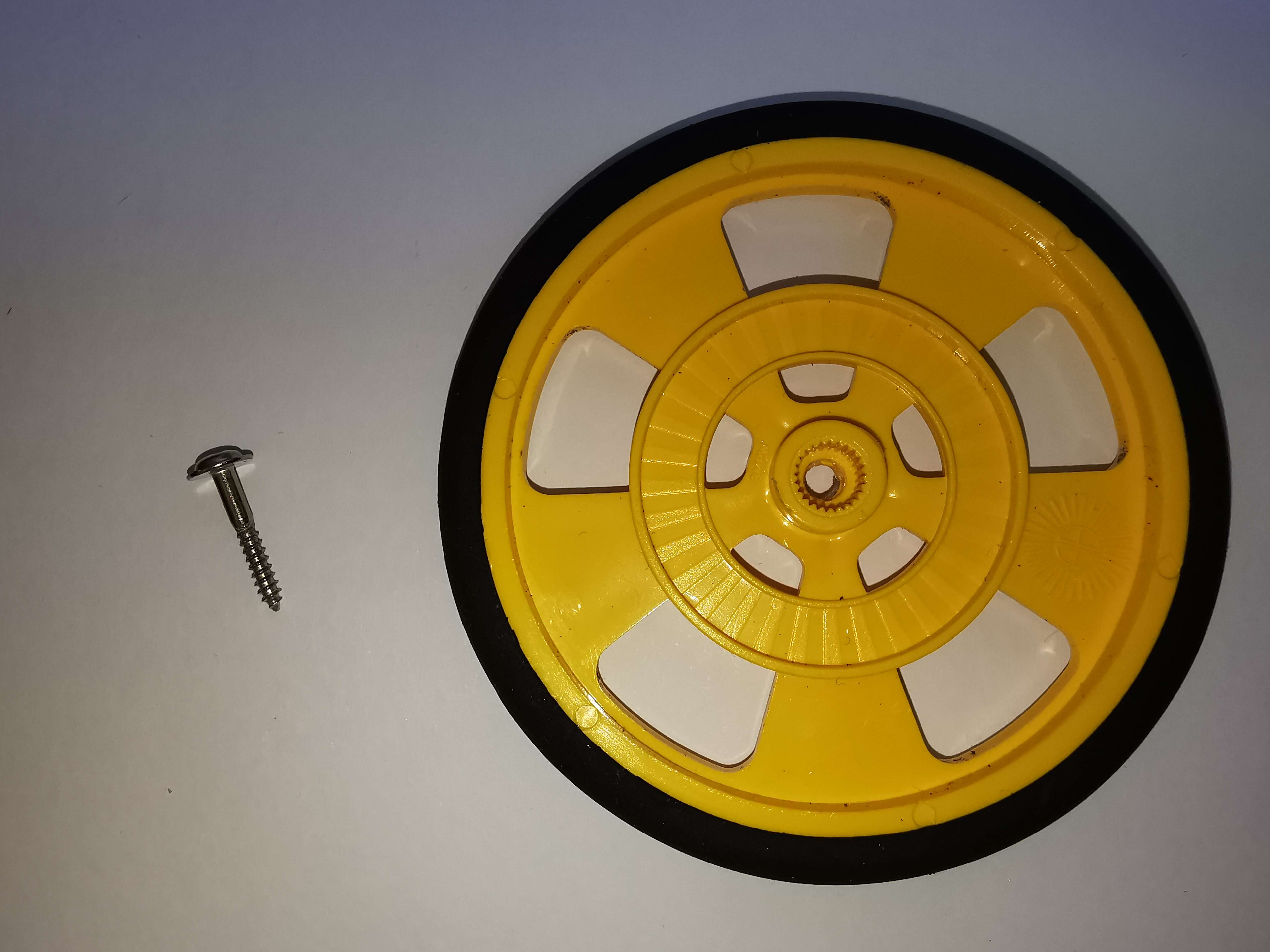
- Roue motrices: Une roue motrice est une roue qui est directement connectée à un moteur et qui est responsable de la transmission de la puissance du moteur au sol.Elle est généralement utilisée dans les véhicules à moteur pour fournir la traction nécessaire pour faire avancer le véhicule.
Il faut savoir que la bille folle accompagnée de deux roues motrices permet un déplacement précis du robot dans un espace. Elle fonctionne également si la bille est immobile, ou même si il n’y a pas de bille. Si la surface utilisée glisse et a très peu de frottement, un prototype de bille folle en PLA ou PETG peut faire largement l’affaire. Le seul inconvénient est la perte de matière liée au contact avec le support. Il faut donc en avoir en plus pour changer la pièce quand l’usure est trop importante.
Pour les roues motrices, qui sont fixés sur l’axe de rotation des servomoteurs, il y a des quelques problèmes :
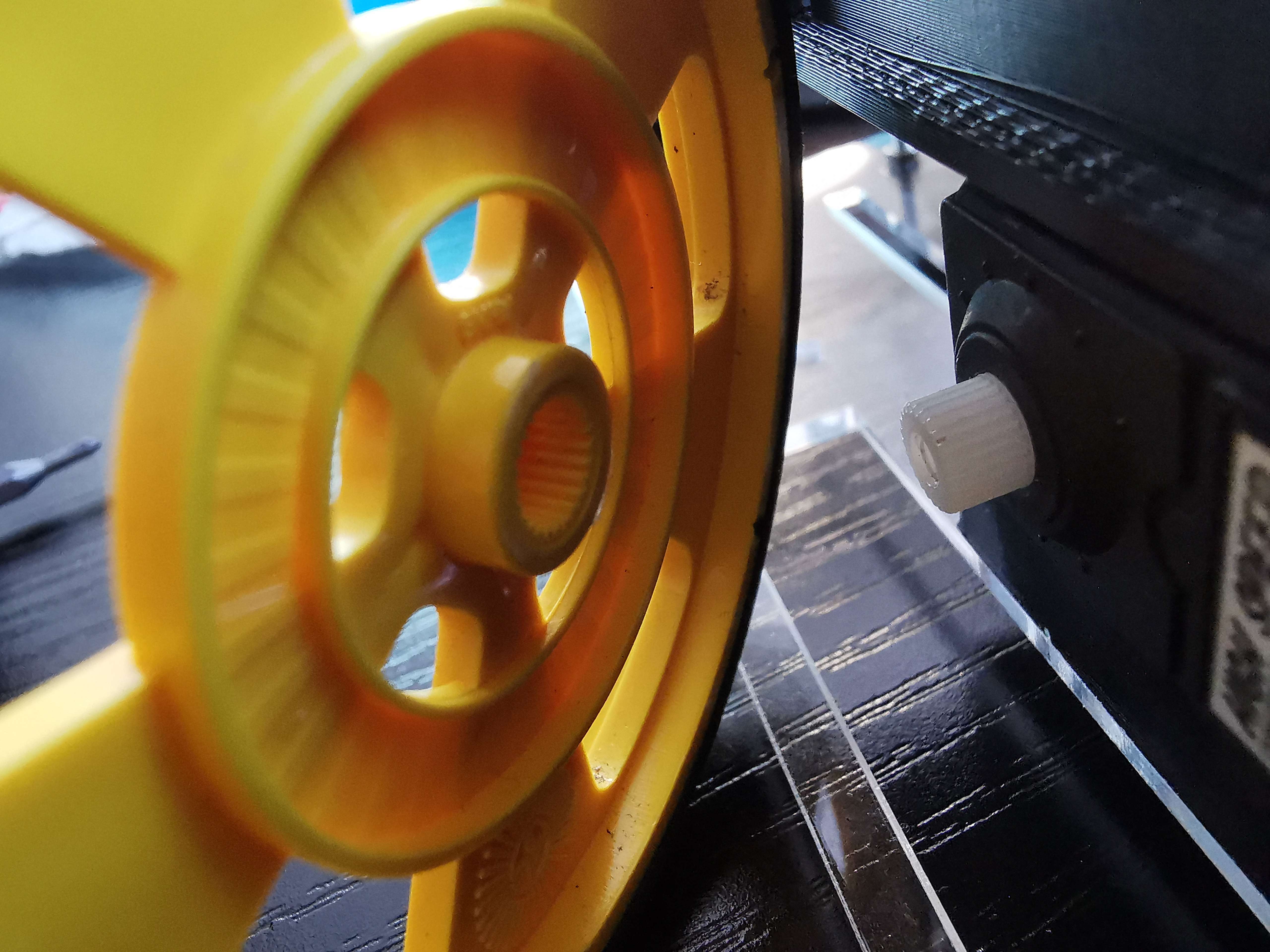
- Le premier est le moyen de fixation, la roue vient se fixer sur l’engrenage du servomoteur, cette fixation est entierement plastique et se fait sur 5 mm. C’est à dire que le matériau se déforme facilement et ne tient sur que sur peu de matière. Provoquant une roue qui bouge de son logement. En résultat, une roue voilée peu importe la force de serrage dans la vis faisant le lien entre les deux.
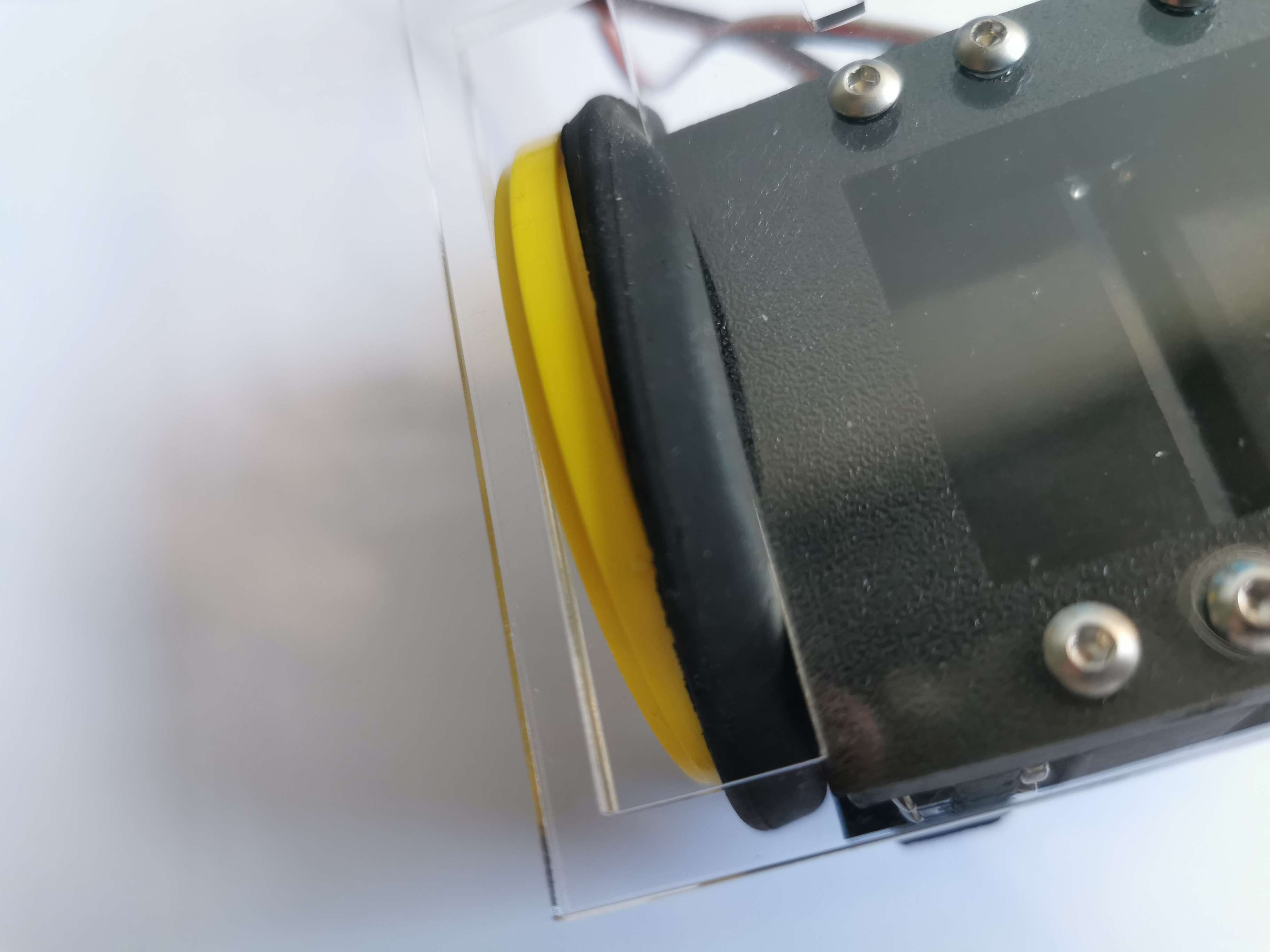
- Le second problème est la qualité du caoutchou entourant la roue. Celui-ci n’est pas régulié sur la surface dû à des aspérités en tout genre, trous, excroissances,… De plus, ce même caoutchou tient à peine sur la roue, il n’est pas assez serré sur celle-ci et se retire sans arrêt lors du déplacement du robot. ce problème est accentué lors des virages où le pneu va entièrement sortir de son logement et bloquer intégralement la rotation du servomoteur. Cela provoque un robot tournant en rond si un seul des servomoteurs est touché et l’arrêt total si les deux sont touchés.
Ce problème a été découvert la veille du premier match, en remarquant que les PAMIs n’allaient pas dans la bonne direction lors de la fin des 90 secondes. Cela a mené l’équipe à réaliser une TO DO LIST afin d’anticiper les défauts avant un match. Malheuresement cette fameuse liste n’a pas terminée la coupe avec une seule vérification à faire.
Il est préférable de fabriquer ses propres roues à l’avance afin d’obtenir les roues les plus adaptées au robot. Le TPU peu être éfficace s’il s’agit d’un robot tout terrain mais est à éviter sur une surface plane car cette matière glisse.