Motorisation
La motorisation est l’une des parties les plus importantes. D’après le réglement de la CDR, le robot ne possède que 10 secondes pour atteindre sa zone. C’est un temps très court, il faut donc des moteurs rapides, précis pour gagner en efficacité et gagner un maximum de point.
Le premier choix a été le TT Motor:

Le TT Motor est un moteur couramment utilisé en Arduino pour des projets de mécanique. Il peut fonctionner sur une plage allant de 3 à 12V. Il nécessite de souder des câbles sur un fragile emplacement en cuivre afin de le controller. Une astuce sur internet conseillait de fixer un collier de serrage sur les câbles pour les empecher de se dessouder. Ce moteur a posé rapidement des problèmes :
-
Taille: Ce moteur reste assez imposant dans son emsemble car le mouvement mécanique du moteur est redirigé dans une autre direction et cela nécessite une succesion d’engrenage stockée dans le compartiment jaune.
-
Vitesse: Le robot fonctionnant en 5V, le moteur peut naturellement être alimenté en 5V mais celà provoque une faible vitesse.
-
Contrôle: Le robot doit également pouvoir se déplacer dans plusieurs directions, comme rouler en arrière mais cela n’est possible qu’en intervertissant les bornes du moteur si celui-ci était configuré en marche avant. Pour avoir la main sur ces configurations, il faut un module externe qui prend de la place, qui chauffe par effet Joule et donc consomme à perte.
C’est un moteur adapté à du prototypage, pour de petits robots, qui ne nécessitent que très peu de précision.
Le second choix a été une erreur de parcours, en prenant des servomoteurs SG90. Mais qu’est ce qu’un servomoteur ?
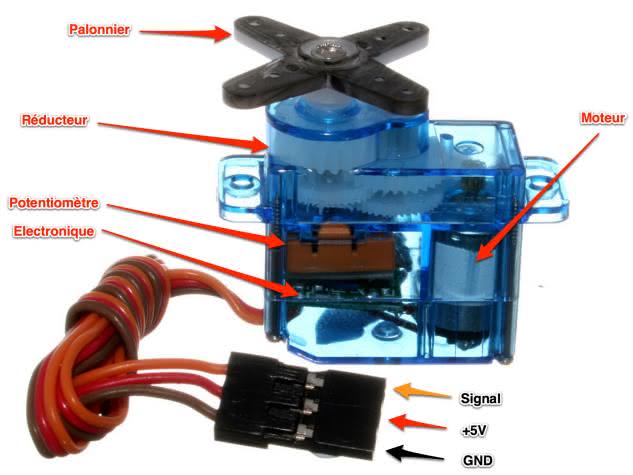
Un servomoteur est un dispositif mécanique qui combine un moteur électrique, un circuit de commande et un système de retour de position. Il est utilisé pour contrôler précisément la position angulaire d’un axe ou pour effectuer des mouvements spécifiques dans un intervalle défini. Les servomoteurs sont couramment utilisés dans les systèmes de contrôle automatisés, tels que les robots, les drones, les imprimantes 3D, etc. Ils offrent une grande précision, une réponse rapide et une facilité de contrôle.
Le problème était sa plage angulaire, le SG90 est un faible servomoteur, très petit, pouvant tourner de 0 à 180°, pas très pratique pour parcourir une distance.
Pour pallier ce problème, il faut réaliser une intervention de précision au coeur du fonctionnement du servomoteur. Il faut couper une excroissance d’un engrenage, calibrer le potentiomètre, le déconnecter,… Si vous souhaitez plus d’informations sur cette manipulation, il existe une multitude de vidéos sur le sujet.
La manipulation sur le SG90 n’est pas simple à réaliser et a même été un échec dans ce cas. Résultant d’une perte de temps importante non négligeable.
Pour finir, le choix du servomoteur était une bonne chose, car il existe des servomoteurs déjà modifiés appelés “continuous”. C’est à dire qu’il est possible de les contrôler en avant comme en arrière à n’importe quelle vitesse, sans module externe et de manière continue. La décision s’est porté sur ce type de moteur pour sa simplicité d’utilisation. Le premier servomoteur continu choisi ne permettait pas d’atteindre sa zone à la fin des 10 secondes réglementaires. IL a fallu en chosir un autre type plus rapide, la taille reste la même et le visuel aussi. Seulement une inscirption “High Speed” est ajoutée.
Les servomoteurs avec l’inscription “High SPeed” ne sont pas forcément plus rapide, veillez à les vérifier en amont.