Le couvercle du robot
Notre robot prévoir d’accueilir moultes systèmes : électroniques, mécaniques, informatiques et affichages. Pour agencer ces différents systèmes du prototype à la version finale, il faut un accès facile dans un premier temps rapide dans un second en cas de panne.
Problématique
L’idée initiale de ce système était d’acceder aux composants par un coté du robot, mais nous nous sommes vite rendu compte que chaque face du robot serait occupée par mécanisme. Comment acceder à l’interieur du robot pour modifier ou disposer des composants facilement sans passé par une des faces exterieures de la machine ?
Solution
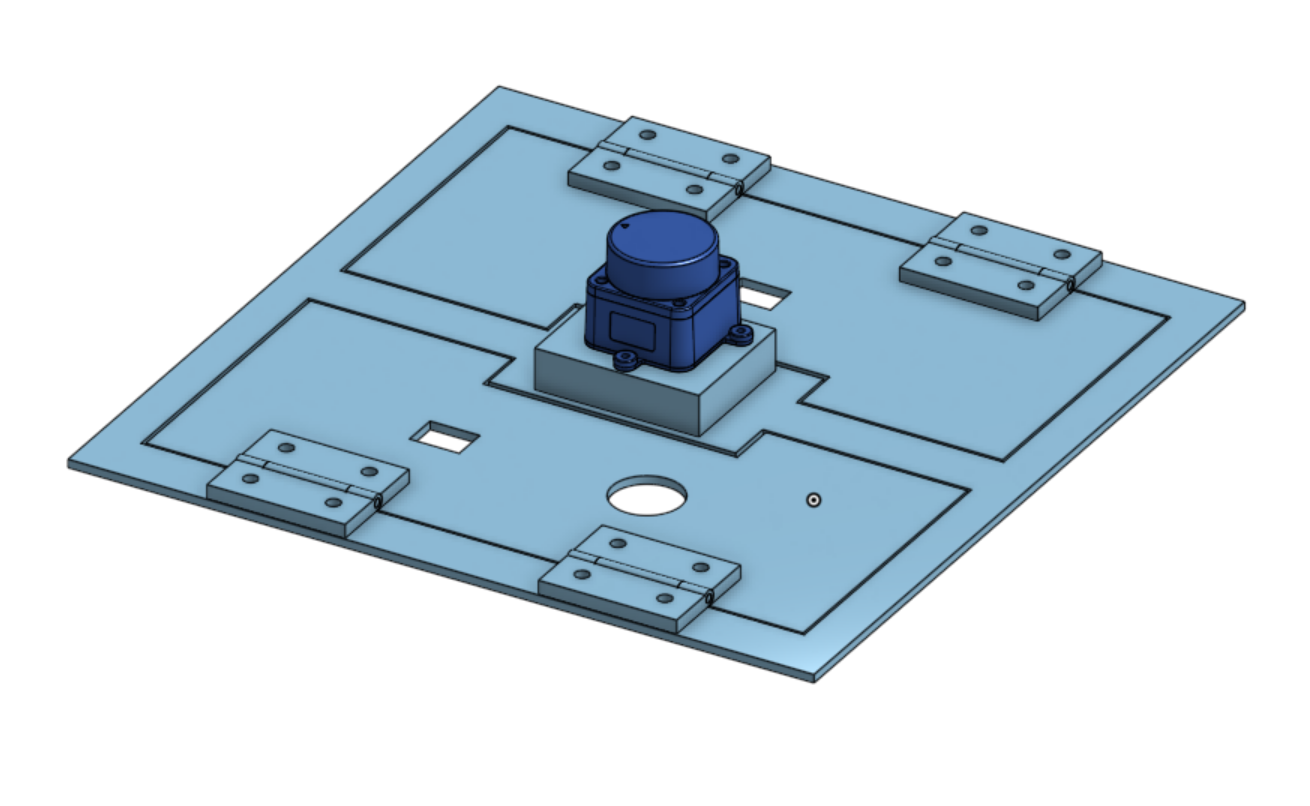
Nous nous avons décidé d’acceder aux entrailles de notre machine par le dessus de cette dernière. Cette facon de faire nous permet en effet d’acceder à l’interieur du robot facilement, elle implique cependant de concevoir des charnières et de contourner le capteur lidar se trouvant sur le “toit”. Pour ce faire, nous décidons de modéliser deux portes autour du capteur, nous voyons comment dans la section Modélisation 3D.
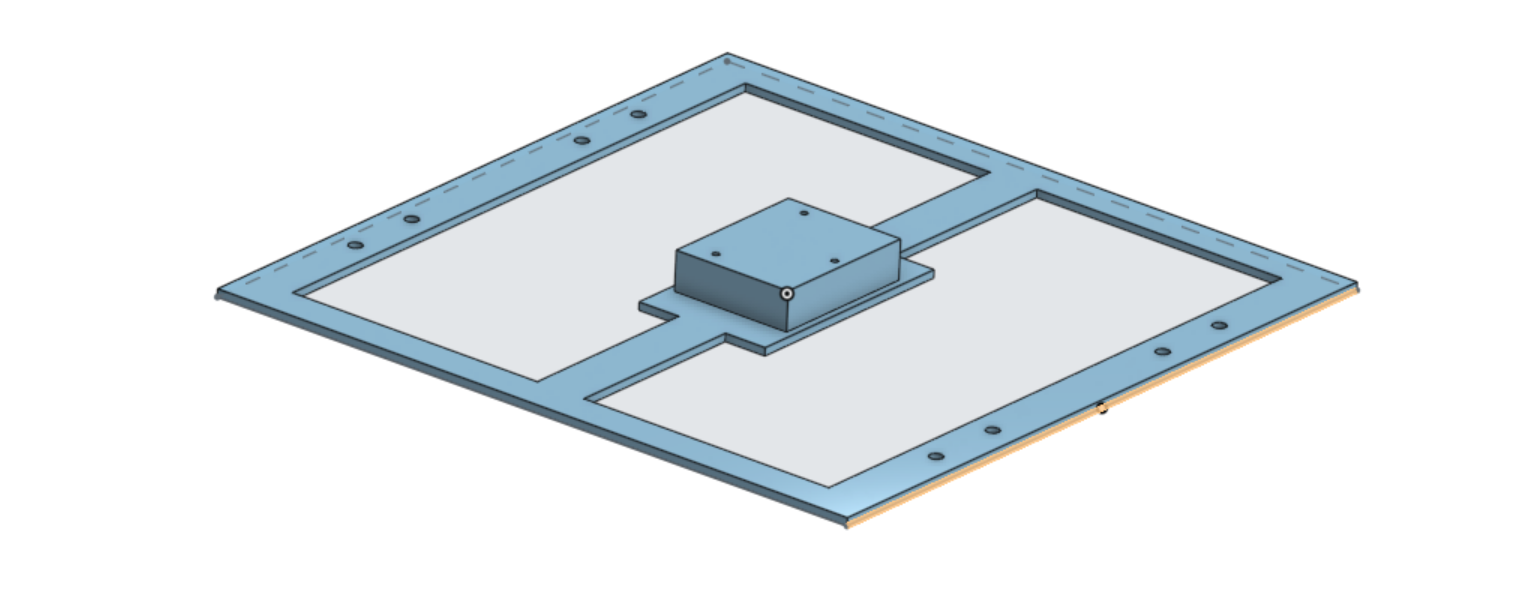 | 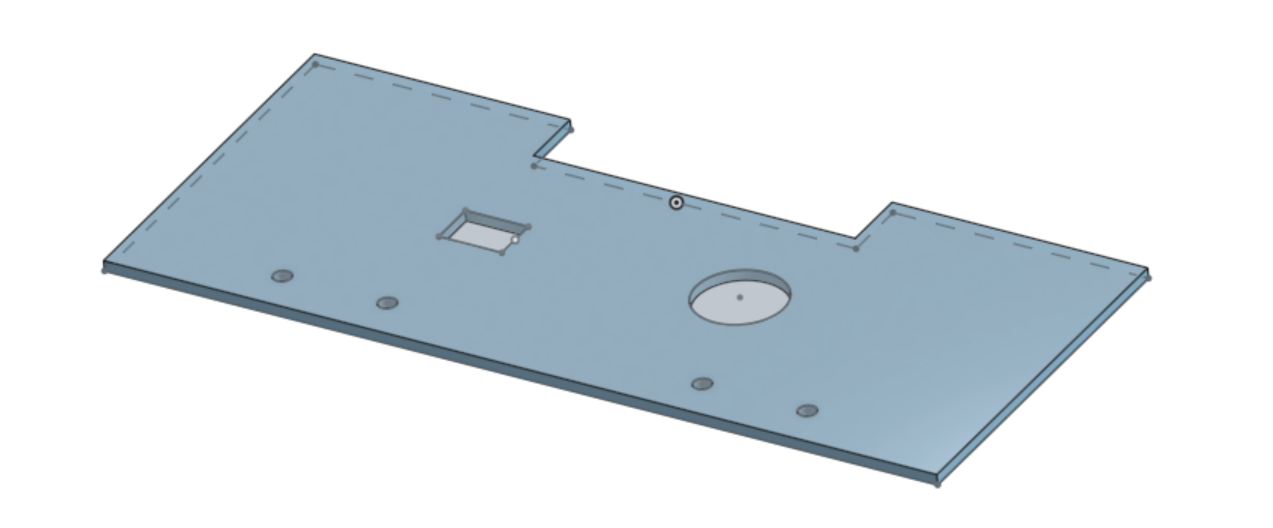 |  |
Modélisation 3D
La modélisation du toit commence par la définition des emplacements dédiés aux futurs composants tel que le capteur lidar ou le bouton d’arret/allumage. C’est ce que nous faisont dans un premier temps, puis dans un second temps nous procédons à l’élaboration des portes et des charnières symultanément afin qu’elles puissent s’accorder le mieux possible.
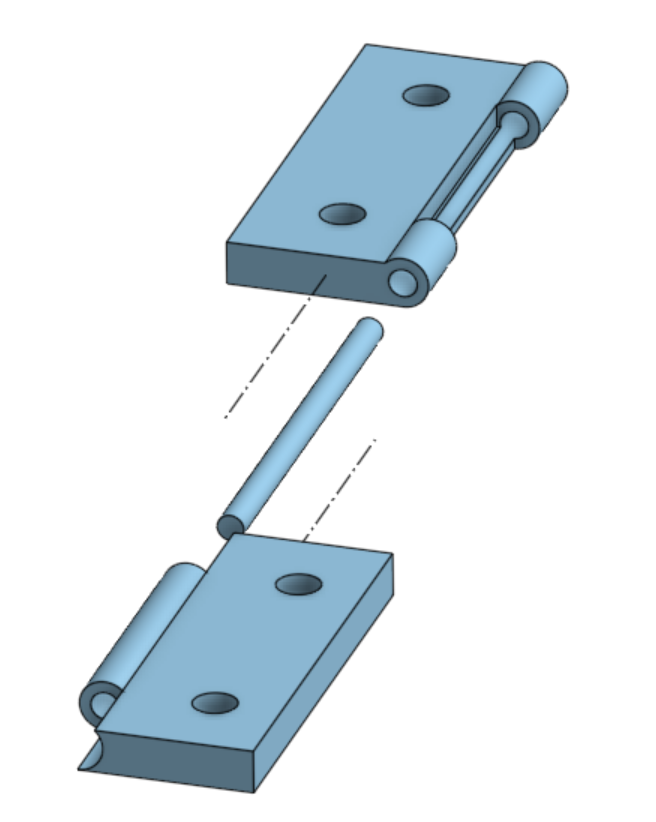
Difficultés rencontrées
La création de portes sur mesure impliquait la création d’un système de charnière adapté. La plus grosse difficulté était l’assemblage qui a demandé plusieurs essais avant d’arriver à un résultat probant.