Cheatsheet
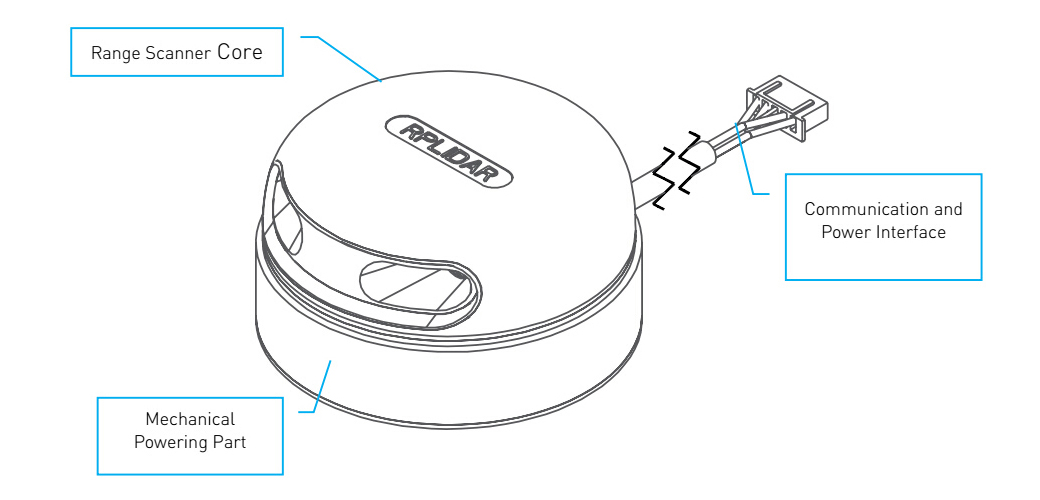
RPLidar A2

This is LiDAR we use at Unimakers club
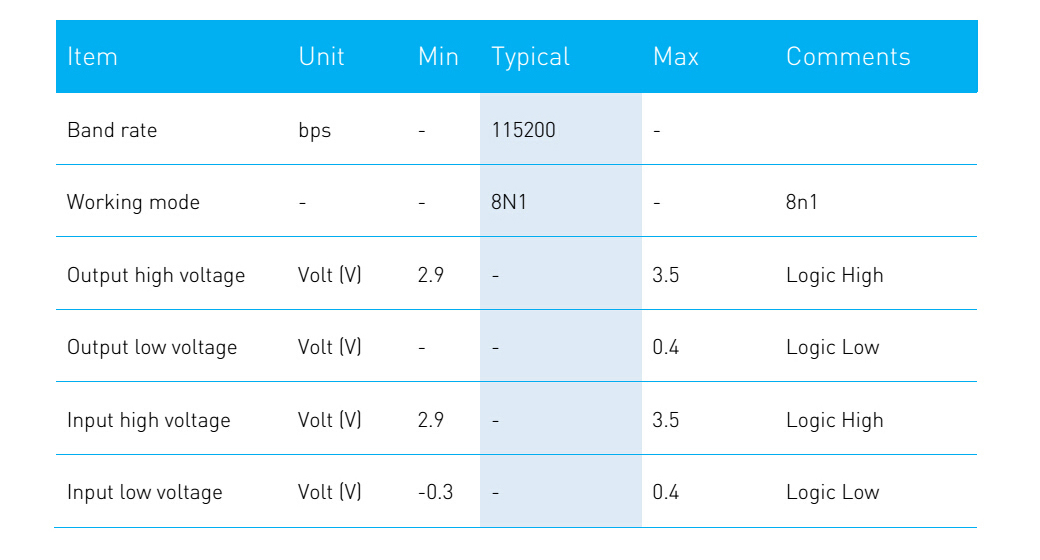
Cheatsheet - Hardware
.jpg)
.jpg)
Cheatsheet - Software
namespace lidar {
// starts lidar service
void startService(Lidar &lidar);
struct LidarPoint {
float distance;
float angle;
uint8_t quality;
bool startBit;
};
struct LidarConfig {
// Hardware Serial, Serial1 or Serial2
HardwareSerial &serial;
// GPIO PIN
int motor_pin;
// 0 -> 360
int motor_speed;
//point aquisition timeout,
// might affect freshness of the points
int timeout;
};
class Lidar {
public:
Lidar();
~Lidar();
// setup the lidar object
void setup(LidarConfig &config);
// get last processed point
const LidarPoint &getCurrentPoint();
};
}